Introduction
Salmon redds (i.e., nests) can be easy to see because they are relatively large and generally appear as regular- or irregular-shaped oval areas that contrast with the undisturbed river bed when viewed from above (
Burner 1951;
Dauble and Watson 1997). Redd count data collected during spawning surveys are used for management purposes ranging from monitoring population size to estimating the carrying capacity of spawning habitat (
Rieman and McIntyre 1996;
Connor et al. 2001). Depending on the study area size, redds can be counted by walking, from rafts or boats, or by fixed-wing aircraft or helicopters (
Gallagher et al. 2007).
Counts of salmon redds, or other natural resources, made from manned aircraft can be inaccurate when the density of the subjects being counted is high. For example, total counts of Chinook salmon (
Oncorhynchus tshawytscha) redds made along the Columbia River from fixed-wing aircraft were two to three times lower than counts made from photographs of the spawning sites surveyed (
Visser et al. 2002). Redd superimposition under high fish densities also increases the inaccuracy of counts (
Groves et al. 2013), particularly if no video record is collected for later verification. Manned aerial surveys are also risky. In British Columbia, Idaho, Oregon, and Washington alone, there were 24 helicopter and fixed-wing aircraft accidents during the past 20 years associated with natural resource monitoring that resulted in 44 individual fatalities (Transportation Safety Board of Canada
(TSBC) 2015;
National Transportation Safety Board (NTSB) 2015). The inaccuracy and risk are two reasons for testing alternative methods for counting redds and other natural resources from the air.
The amount of literature on the use of unmanned aircraft systems (UASs) as an alternative to manned flights for counting animals has increased dramatically in recent years. Animals that have been monitored with UASs include surface-oriented marine, terrestrial, and tree-dwelling mammals, as well as waterbirds and aquatic reptiles (
Chabot and Bird 2015). Compared to wildlife, the peer-reviewed literature on the use of UASs to count fish is scant, and the counts were made within relatively small study areas. For example,
Kudo et al. (2012) evaluated the potential for replacing manned aircraft with a UAS to count Chum salmon (
Oncorhynchus keta) in a 600 m section of a small stream in Japan.
Whitehead et al. (2014) described the use of a UAS to count individual Sockeye salmon (
Oncorhynchus nerka) within two major spawning sites located along a ≈2000 m stretch of river in British Columbia. It is well known that counting animals in larger study areas can be hampered by current limitations (e.g., battery life) and regulations that restrict the operational range of UASs to “within line of sight” (e.g.,
Chabot and Bird 2015;
Linchant et al. 2015). In large terrestrial and aquatic systems, survey sampling methods can be adopted in lieu of complete census counts to overcome such limitations.
Linchant et al. (2015), however, indicated that most of the literature on UASs and survey sampling methods was centered on classical line transect sampling, and that new methods to inventory animals needed to be tested.
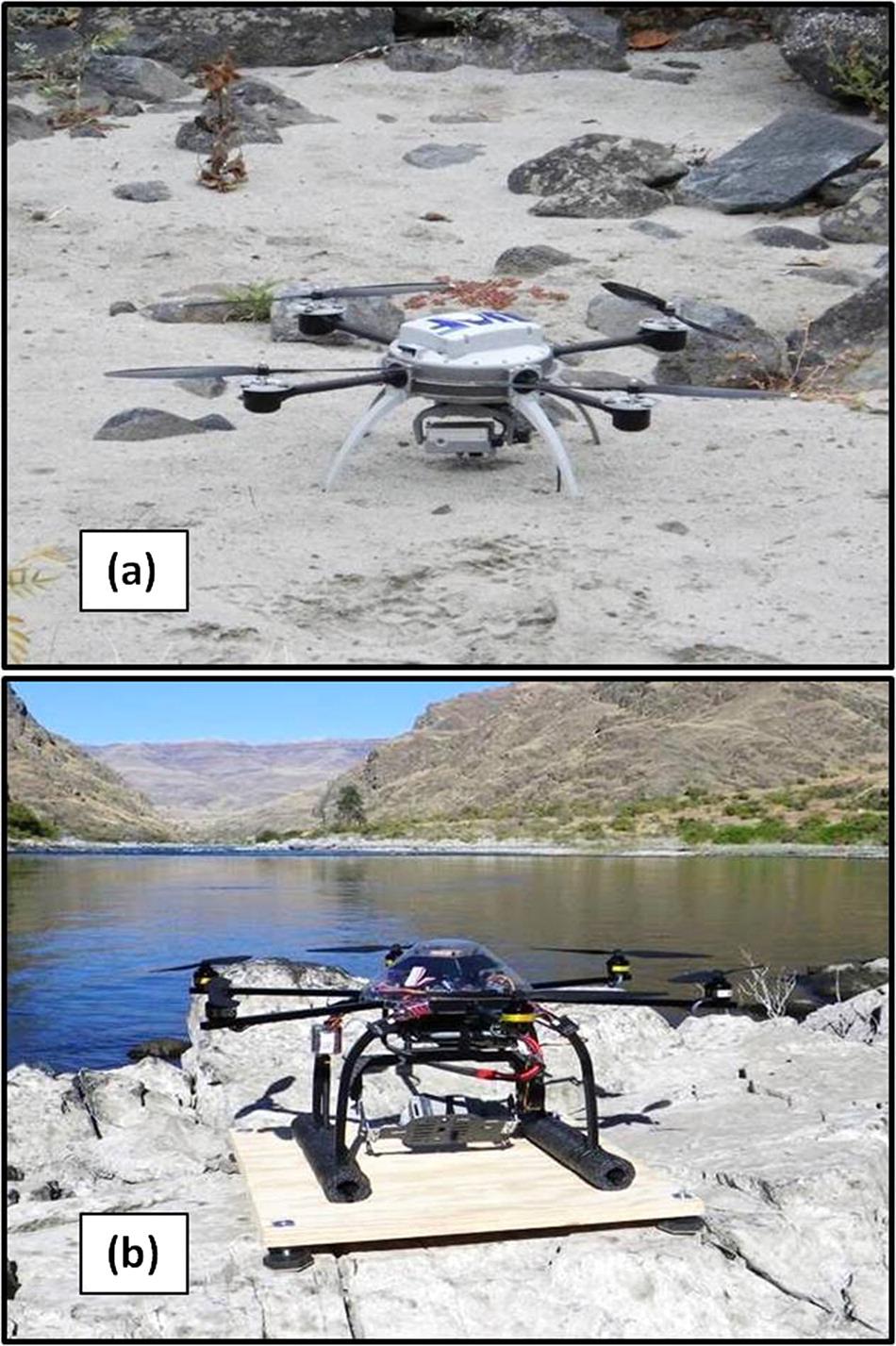
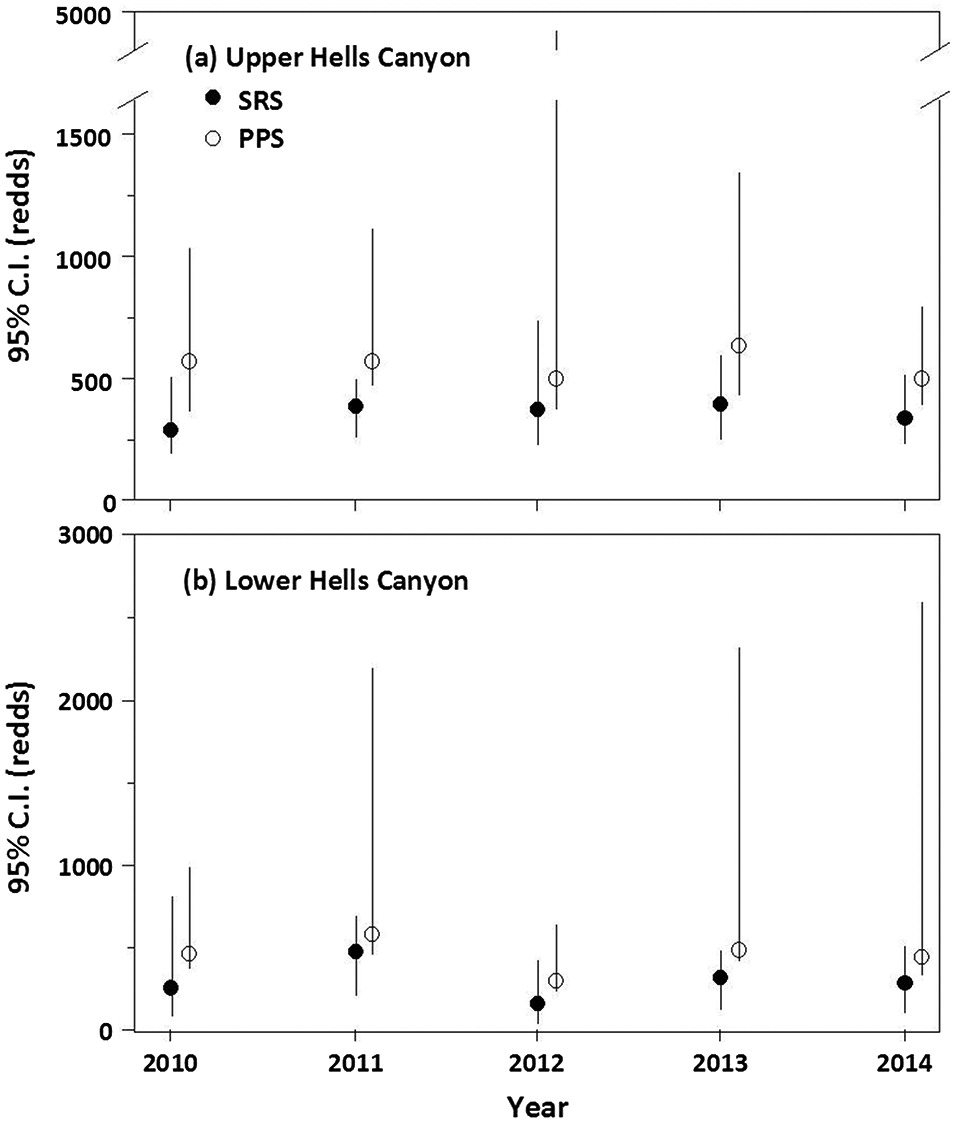
From 2012 to 2014 UASs were tested for counting redds constructed by Chinook salmon below the surface waters of two spawning areas located along a stretch (≈161 km) of a large river. The goal was to increase the understanding of how trends in annual total redd counts could be monitored with less dependence on manned aircraft. The objectives of this paper are (1) to describe 3 years of experience with commercially available UASs and (2) to compare two survey sampling methods for estimating (95% CI) annual total redd counts within each spawning area.
Discussion
Application of UASs provided high-quality video images of redds excavated up to 3 m below the water surface at selected sites, and the redd counts taken from those images were more accurate than counts made from a manned helicopter. The large body of wildlife literature reviewed by
Linchant et al. (2015) showed that counts made with a UAS are not always more accurate than counts made by other means (e.g., ground counts) as there was large variation in the accuracy comparisons reported. With regard to fish,
Kudo et al. (2012) used a UAS to count Chum salmon about once a week for 8 weeks and also seined and counted the fish weekly from the study area for comparison. The UAS count was lower than the seine count during 7 of the 8 weeks, but higher during 1 week. The total UAS and seine counts were 705 and 1348, respectively. One reason for increased accuracy when counting redds along the Lower Snake River was that the UAS video images were reviewed multiple times, and the between-survey comparisons made it easier to identify new redds through time. Also, observers in the helicopter only had one or two chances to count redds as quickly as possible with no opportunity for later review. As such, counting from the helicopter became increasingly difficult and counts more uncertain as redds became superimposed under high spawner densities. Additionally, the census counts made from the helicopter on a particular day were made by a single observer and not replicated by a second observer. The lack of replicated counts made it impossible to describe the uncertainty (e.g., a 95% CI) in the census counts.
It must be noted that collecting accurate count data at the site level with a UAS was a learning process that required ample funding including the provision of a backup aircraft. The annual cost of UAS application exceeded the annual cost of a manned helicopter survey by $6817, but that cost differential cannot be applied across all studies. As a case in point, the estimated cost of counting Chum salmon within a small study area from a helicopter was about seven times higher than the cost observed for UAS application (
Kudo et al. 2012). Collecting data with a UAS also required federal authorization that was very difficult to understand and obtain during the 2012–2014 test years. Obtaining federal authorization has been recognized internationally as one of the major factors impeding the use of UAS technology for natural resource purposes, but there is some evidence that such authorization will become easier to obtain (
Linchant et al. 2015). In fact, the FAA granted the Idaho Power Company a COA in 2015.
Another noteworthy point that requires recognition is that the collection of accurate count data at the site level is just one of two important components of enumerating natural resources with UAS technology.
Jones et al. (2006), who conducted one of the earliest proof-of-concept tests, stressed the importance of pairing data collected with a UAS with appropriate statistical methods. Efforts to pair accurate count data collected with an unmanned aircraft with statistical methods are undoubtedly increasing, but the peer-reviewed literature on the topic is presently sparse (
Linchant et al. 2015).
Kudo et al. (2012) regressed weekly UAS counts of Chum salmon against the corresponding weekly seine counts. The two sets of weekly counts were highly correlated (
r 2 = 0.93;
P < 0.0001), and it was concluded that future abundance estimates could be made by inputting UAS count data into the regression equation. Density estimates made with the Jolly method for elephant (
Loxodonta africana) in Africa were potentially biased because it was determined that single observers missed 14.7% of the elephants in the video images (
Vermeulen et al. 2013). Undercounting was eliminated by assigning two observers to count the animals. Density estimates made with a generalized linear model for cattle (
Bos taurus) in Spain were consistently higher than the known densities (
Mulero-Pázmány et al. 2015). The researchers concluded that the bias resulted from focusing the UAS application on areas with high cattle densities and recommended STRS as a remedy.
In the simulations conducted to evaluate pairing UAS application with a survey sampling method, STRS provided estimates of annual total redd counts that were more accurate than the estimates provided by PPS. The large majority of the accuracy ratios for STRS were close to 1.000 in
Table 5 suggesting a high level of accuracy. Conversely, the relative accuracies reported in
Table 4 (converted to proportions) for the site-specific redd counts made from a manned helicopter ranged from 0.579 to 0.924. Comparing those two sets of results at face value provides evidence for the following conclusion. Application of a UAS with STRS would produce estimates of annual total redd counts that would be more accurate than census counts made from a manned helicopter. It is import to recognize, however, that each of the 1000 sets of estimates from simulation analyses also had unreported estimates representing the 2.5th, 25th, 75th, and 97.5th percentiles that would be lower or higher than the median estimate analyzed to calculate the accuracy ratios in
Table 5. Thus, in actual field application, when only a single set of sites would be drawn for survey with a UAS in each of the spawning areas in a given year, and only a single annual total count would be estimated for each of those areas, that estimate could undetectably differ from the true annual total counts. Potential users of UASs should conduct simulation analyses with historical data collected within their study areas to fully evaluate the efficacy of UAS application.
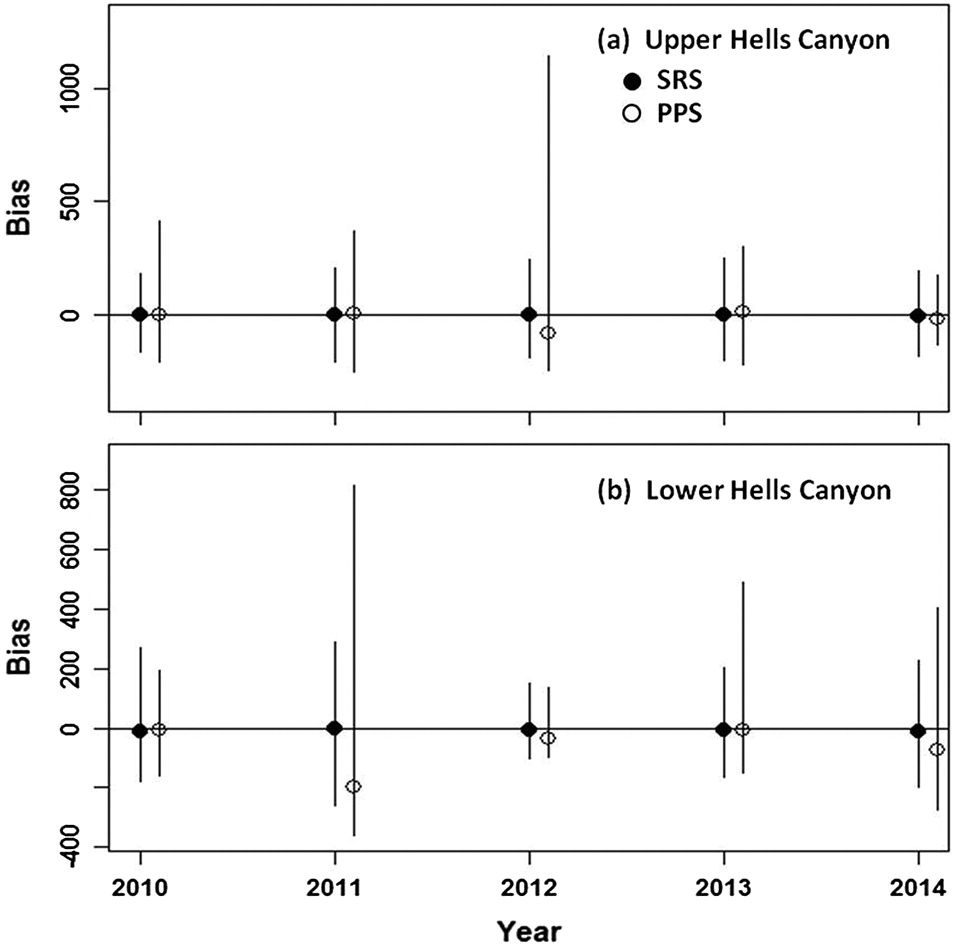
The redd count simulation analyses also detected differences in the coverage of the annual total redd counts estimated with the two survey sampling methods tested. Although STRS produced unbiased estimates, the 95% CIs exhibited under-coverage, notably so for the Lower Hells Canyon spawning area. The performance of PPS was less consistent compared to STRS in both bias and coverage. In years when PPS performed well, it was unbiased and obtained 100% coverage, but that coverage was due to conservative (i.e., wide) CIs. In years when PPS performed poorly, the estimates tended to be biased and the coverage was very low. The relatively poor performance of both methods in the Lower Hells Canyon spawning area corresponded to non-normal sampling distributions in the simulations. The STRS method did achieve a normal sampling distribution for the Upper Hells Canyon spawning area with a sample size of 25 survey sites, whereas PPS did not. Therefore, it is likely that STRS can be used for reliable estimation of total redds in the Upper Hells Canyon spawning area, but a different technique should be explored in the future for the Lower Hells Canyon spawning area.
Wide inter-annual variability in site use by spawners in the Lower Hells Canyon spawning area was likely responsible for both the bias in the PPS estimates and the low coverage of the STRS estimates. For example, a site that was classified as a high-use spawning site based on the historical record of use qualified as a low-use site the year a survey was simulated. One factor that might affect such unpredictable site use is the social aspect of spawning (
Groves et al. 2013). If fish begin to spawn at one site earlier than at a second adjacent site, the habitat alterations created by the first spawners might subsequently and disproportionately draw fish to the first site (e.g., for brook trout
Salvelinus fontinalis and brown trout
Salmo trutta;
Essington et al. 1998). In addition to social spawning, covariates that might influence inter-annual variation in spawning site selection include water depth, water velocity, and geomorphology (e.g.,
Geist and Dauble 1998;
Groves and Chandler 1999;
Hanrahan 2007). With a covariate that strongly correlated with the redd counts at each site, the PPS method could be modified to produce consistently unbiased, and much more efficient estimates (i.e., require fewer site surveys than needed for STRS). With a more accurate estimation of the variance of use at each site, or a better understanding of the covariates that affect that variance, an appropriate sample size could be obtained to improve the coverage of the annual total redd count estimates made with STRS. However, the sample size of sites to be surveyed could become very large (i.e., approach the point of becoming a census).
Additional survey sampling methods might be considered not only for the Lower Hells Canyon spawning area, but for other large study areas where UAS application is being tested. Adaptive sampling methods are useful for highly aggregated populations (e.g.,
Woodby 1998;
Conroy et al. 2008) as might be the case in the Lower Hells Canyon spawning area. Such adaptive approaches use multiple stages, beginning with either measuring randomly selected sites or performing a low-intensity detection method. Then, sites are added using a selection rule given the data gathered from the first stage. Data are then collected on those additional sites. This process would be repeated until the selection rule results in no new sites (
Woodby 1998). Such adaptive approaches may be viable if the extra effort can be allocated during the early portion of a given survey period to develop the sample.
Concluding remarks
Unmanned aircraft paired with survey sampling methods avoid the risk that accompanies manned aircraft flights when enumerating natural resources. The potential for expanding the use of unmanned aircraft is large, especially when the study areas are intermediate or small in size. It is not a simple matter, however, to conclude that coupling the two methods is the best alternative for conducting natural resource surveys in large study areas such as the lower Snake River and its tributaries.
The managers we (i.e., the authors) inform are seeking to recover fall-run Chinook salmon listed under the US Endangered Species Act (
National Marine Fisheries Service (NMFS) 1992) that spawn in portions of the Clearwater, Grande Ronde, Salmon, and Imnaha river drainages (
Fig. 1) in addition to the Upper and Lower Hells Canyon spawning areas. Manned helicopter flights were replaced with UAS application in Hells Canyon in 2015 for the sake of safety and because the counts made from the helicopter were no longer accurate, whereas the remaining spawning areas continued to be surveyed from a helicopter pending the results of our tests with UAS, and easier access to COAs. Our managers, as well as managers of other large aquatic and terrestrial ecosystems, are now being challenged with a discordant flow of information during a period of transition. Application of UASs will inform management objectives safely but long-term, system-wide census counts will be replaced by estimates with inherent uncertainty. Ongoing manned aircraft surveys will inform those same objectives with risk, while maintaining long-term census counts that have become inaccurate as spawner densities have increased, and do not include estimates of precision.
Use of unmanned aircraft capable of long-range operation beyond line of sight to conduct complete census counts would solve the statistical problem associated with the survey sampling methods described here, but natural resource professionals do not have access to such technology. Furthermore, such operation is heavily restricted in most developed countries (
Chabot and Bird 2015). Increasing the number of crews operating UASs within line of sight to achieve a complete census would eliminate problems with bias and coverage. Additional funding, training opportunities to increase the number of certified UAS operators, and streamlined access to COAs would be needed for this solution to work, however. Alternatively, management objectives could be revised with the limitations of UAS application in mind.